7255 - 地图探险(explore)
小 A 打算前往一片丛林去探险。丛林的地理环境十分复杂,为了防止迷路,他先派遣了一个机器人前去探路。
丛林的地图可以用一个 n 行 m 列的字符表来表示。我们将第 i 行第 j 列的位置的坐标记作 (i, j)(1 \leq i \leq n, 1 \leq j \leq m)。如果这个位置的字符为 \tt x,即代表这个位置上有障碍,不可通过。反之,若这个位置的字符为 \tt.,即代表这个位置是一片空地,可以通过。
这个机器人的状态由位置和朝向两部分组成。其中位置由坐标 (x, y)(1 \leq x \leq n, 1 \leq y \leq m) 刻画,它表示机器人处在地图上第 x 行第 y 列的位置。而朝向用一个 0 \sim 3 的 整数 d 表示,其中 d = 0 代表向东,d = 1 代表向南,d = 2 代表向西,d = 3 代表向北。
初始时,机器人的位置为 (x_0, y_0),朝向为 d_0。保证初始时机器人所在的位置为空地。接下来机器人将要进行 k 次操作。每一步,机器人将按照如下的模式操作:
假设机器人当前处在的位置为 (x, y),朝向为 d。则它的方向上的下一步的位置 (x^′, y^′) 定义如下:若 d = 0,则令 (x^′, y^′) = (x, y + 1),若 d = 1,则令 (x^′, y^′) = (x + 1, y),若 d = 2,则令 (x^′, y^′) = (x, y - 1),若 d = 3,则令 (x^′, y^′) = (x − 1, y)。
接下来,机器人判断它下一步的位置是否在地图内,且是否为空地。具体地说,它判断 (x^′, y^′) 是否满足 1 \leq x^′ \leq n, 1 \leq y^′ \leq m,且 (x^′, y^′) 位置上是空地。如果条件成立,则机器人会向前走一步。它新的位置变为 (x^′, y^′),且朝向不变。如果条件不成立,则它会执行“向右转”操作。也就是说,令 d^′ = (d + 1) \bmod 4(即 d + 1 除以 4 的余数),且它所处的位置保持不变,但朝向由 d 变为 d^′。
小 A 想要知道,在机器人执行完 k 步操作之后,地图上所有被机器人经过的位置(包括起始位置)有几个。
输入
输入的第一行包含一个正整数 T,表示数据组数。
接下来包含 T 组数据,每组数据的格式如下:
第一行包含三个正整数 n, m, k。其中 n, m 表示地图的行数和列数,k 表示机器人执行操作的次数。
第二行包含两个正整数 x_0, y_0 和一个非负整数 d_0。
接下来 n 行,每行包含一个长度为 m 的字符串。保证字符串中只包含 \tt{x} 和 \tt{.} 两个字符。其中,第 x 行的字符串的第 y 个字符代表的位置为 (x, y)。这个位置是 \tt{x} 即代表它是障碍,否则代表它是空地。数据保证机器人初始时所在的位置为空地。
输出
对于每组数据:输出一行包含一个正整数,表示地图上所有被机器人经过的位置(包括起始位置)的个数。
样例
输入
2 1 5 4 1 1 2 ....x 5 5 20 1 1 0 ..... .xxx. .x.x. ..xx. x....
输出
3 13
提示
【样例 1 解释】
该样例包含两组数据。对第一组数据,机器人的状态以如下方式变化:
- 初始时,机器人位于位置 (1, 1),方向朝西(用数字 2 代表)。
- 第一步,机器人发现它下一步的位置 (1, 0) 不在地图内,因此,它会执行“向右转”操作。此时,它的位置仍然为 (1, 1),但方向朝北(用数字 3 代表)。
- 第二步,机器人发现它下一步的位置 (0, 1) 不在地图内,因此,它仍然会执行“向右转”操作。此时,它的位置仍然为 (1, 1),但方向朝东(用数字 0 代表)。
- 第三步,机器人发现它下一步的位置 (1, 2) 在地图内,且为空地。因此,它会向东走一步。此时,它的位置变为 (1, 2),方向仍然朝东。
- 第四步,机器人发现它下一步的位置 (1, 3) 在地图内,且为空地。因此,它会向东走一步。此时,它的位置变为 (1, 3),方向仍然朝东。
因此,四步之后,机器人经过的位置有三个,分别为 (1, 1),(1, 2),(1, 3)。
对第二组数据,机器人依次执行的操作指令为:向东走到 (1, 2),向东走到 (1, 3),向东走到 (1, 4),向东走到 (1, 5),向右转,向南走到 (2, 5),向南走到 (3, 5),向南走到 (4, 5),向南走到 (5, 5),向右转,向西走到 (5, 4),向西走到 (5, 3),向西走到 (5, 2),向右转,向北走到 (4, 2),向右转,向右转,向南走到 (5, 2),向右转,向右转。
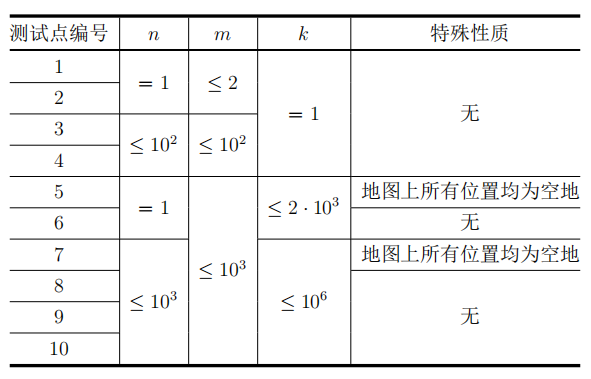
【数据范围】
对于所有测试数据,保证:1 \leq T \leq 5, 1 \leq n, m \leq 10^3,1 \leq k \leq 10^6,1 \leq x_0 \leq n,1 \leq y_0 \leq m,0 \leq d_0 \leq 3,且机器人的起始位置为空地。
来源
CSP